二分图最大权匹配 学习笔记
二分图的最大权匹配是指二分图中边权和最大的匹配。
Hungarian Algorithm(Kuhn–Munkres Algorithm)
匈牙利算法又称为 KM 算法,可以在 时间内求出二分图的 最大权完美匹配。
考虑到二分图中两个集合中的点并不总是相同,为了能应用 KM 算法解决二分图的最大权匹配,需要先作如下处理:将两个集合中点数比较少的补点,使得两边点数相同,再将不存在的边权重设为 ,这种情况下,问题就转换成求 最大权完美匹配问题,从而能应用 KM 算法求解。
可行顶标
给每个节点 分配一个权值 ,对于所有边 满足 。
相等子图
在一组可行顶标下原图的生成子图,包含所有点但只包含满足 的边 。
定理 1
对于某组可行顶标,如果其相等子图存在完美匹配,那么,该匹配就是原二分图的最大权完美匹配。
证明
考虑原二分图任意一组完美匹配 ,其边权和为
任意一组可行顶标的相等子图的完美匹配 的边权和
即任意一组完美匹配的边权和都不会大于 ,那个 就是最大权匹配。
有了定理 1,我们的目标就是透过不断的调整可行顶标,使得相等子图是完美匹配。
因为两边点数相等,假设点数为 , 表示左边第 个点的顶标, 表示右边第 个点的顶标, 表示左边第 个点和右边第 个点之间的权重。
首先初始化一组可行顶标,例如
然后选一个未匹配点,如同最大匹配一样求增广路。找到增广路就增广,否则,会得到一个交错树。
令 , 表示二分图左边右边在交错树中的点,, 表示不在交错树中的点。
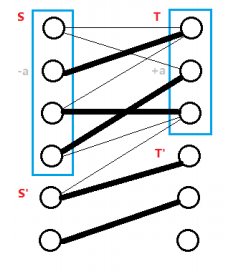
在相等子图中:
- 的边不存在,否则交错树会增长。
- 一定是非匹配边,否则他就属于 。
假设给 中的顶标 ,给 中的顶标 ,可以发现
- 边依然存在相等子图中。
- 没变化。
- 中的 有所减少,可能加入相等子图。
- 中的 会增加,所以不可能加入相等子图。
所以这个 值的选择,显然得是 当中最小的边权,
。
当一条新的边 加入相等子图后有两种情况
- 是未匹配点,则找到增广路
- 和 中的点已经匹配
这样至多修改 次顶标后,就可以找到增广路。
每次修改顶标的时候,交错树中的边不会离开相等子图,那么我们直接维护这棵树。
我们对 中的每个点 维护
。
所以可以在 算出顶标修改值
交错树新增一个点进入 的时候需要 更新 。修改顶标需要 给每个 减去 。只要交错树找到一个未匹配点,就找到增广路。
一开始枚举 个点找增广路,为了找增广路需要延伸 次交错树,每次延伸需要 次维护,共 。
参考代码
template <typename T> struct hungarian { // km
int n;
vector<int> matchx; // 左集合对应的匹配点
vector<int> matchy; // 右集合对应的匹配点
vector<int> pre; // 连接右集合的左点
vector<bool> visx; // 拜访数组 左
vector<bool> visy; // 拜访数组 右
vector<T> lx;
vector<T> ly;
vector<vector<T>> g;
vector<T> slack;
T inf;
T res;
queue<int> q;
int org_n;
int org_m;
hungarian(int _n, int _m) {
org_n = _n;
org_m = _m;
n = max(_n, _m);
inf = numeric_limits<T>::max();
res = 0;
g = vector<vector<T>>(n, vector<T>(n));
matchx = vector<int>(n, -1);
matchy = vector<int>(n, -1);
pre = vector<int>(n);
visx = vector<bool>(n);
visy = vector<bool>(n);
lx = vector<T>(n, -inf);
ly = vector<T>(n);
slack = vector<T>(n);
}
void addEdge(int u, int v, int w) {
g[u][v] = max(w, 0); // 负值还不如不匹配 因此设为0不影响
}
bool check(int v) {
visy[v] = true;
if (matchy[v] != -1) {
q.push(matchy[v]);
visx[matchy[v]] = true; // in S
return false;
}
// 找到新的未匹配点 更新匹配点 pre
// 数组记录着"非匹配边"上与之相连的点
while (v != -1) {
matchy[v] = pre[v];
swap(v, matchx[pre[v]]);
}
return true;
}
void bfs(int i) {
while (!q.empty()) {
q.pop();
}
q.push(i);
visx[i] = true;
while (true) {
while (!q.empty()) {
int u = q.front();
q.pop();
for (int v = 0; v < n; v++) {
if (!visy[v]) {
T delta = lx[u] + ly[v] - g[u][v];
if (slack[v] >= delta) {
pre[v] = u;
if (delta) {
slack[v] = delta;
} else if (check(v)) { // delta=0
// 代表有机会加入相等子图
// 找增广路 找到就return
// 重建交错树
return;
}
}
}
}
}
// 没有增广路 修改顶标
T a = inf;
for (int j = 0; j < n; j++) {
if (!visy[j]) {
a = min(a, slack[j]);
}
}
for (int j = 0; j < n; j++) {
if (visx[j]) { // S
lx[j] -= a;
}
if (visy[j]) { // T
ly[j] += a;
} else { // T'
slack[j] -= a;
}
}
for (int j = 0; j < n; j++) {
if (!visy[j] && slack[j] == 0 && check(j)) {
return;
}
}
}
}
void solve() {
// 初始顶标
for (int i = 0; i < n; i++) {
for (int j = 0; j < n; j++) {
lx[i] = max(lx[i], g[i][j]);
}
}
for (int i = 0; i < n; i++) {
fill(slack.begin(), slack.end(), inf);
fill(visx.begin(), visx.end(), false);
fill(visy.begin(), visy.end(), false);
bfs(i);
}
// custom
for (int i = 0; i < n; i++) {
if (g[i][matchx[i]] > 0) {
res += g[i][matchx[i]];
} else {
matchx[i] = -1;
}
}
cout << res << "\n";
for (int i = 0; i < org_n; i++) {
cout << matchx[i] + 1 << " ";
}
cout << "\n";
}
};转化为费用流模型
与 二分图最大匹配 类似,二分图的最大权匹配也可以转化为网络流问题来求解。
首先,在图中新增一个源点和一个汇点。
从源点向二分图的每个左部点连一条流量为 ,费用为 的边,从二分图的每个右部点向汇点连一条流量为 ,费用为 的边。
接下来对于二分图中每一条连接左部点 和右部点 ,边权为 的边,则连一条从 到 ,流量为 ,费用为 的边。
另外,考虑到最大权匹配下,匹配边的数量不一定与最大匹配的匹配边数量相等,因此对于每个左部点,还需向汇点连一条流量为 ,费用为 的边。
求这个网络的 最大费用最大流 即可得到答案。此时,该网络的最大流量一定为左部点的数量,而最大流量下的最大费用即对应一个最大权匹配方案。