AC 自动机 学习笔记
概述
AC(Aho–Corasick)自动机是 以 Trie 的结构为基础,结合 KMP 的思想 建立的自动机,用于解决多模式匹配等任务。
AC 自动机本质上是 Trie 上的自动机。
解释
简单来说,建立一个 AC 自动机有两个步骤:
- 基础的 Trie 结构:将所有的模式串构成一棵 Trie;
- KMP 的思想:对 Trie 树上所有的结点构造失配指针。
建立完毕后,就可以利用它进行多模式匹配。
字典树构建
AC 自动机在初始时会将若干个模式串插入到一个 Trie 里,然后在 Trie 上建立 AC 自动机。这个 Trie 就是普通的 Trie,按照 Trie 原本的建树方法建树即可。
需要注意的是,Trie 中的结点表示的是某个模式串的前缀。我们在后文也将其称作状态。一个结点表示一个状态,Trie 的边就是状态的转移。
形式化地说,对于若干个模式串 ,将它们构建一棵字典树后的所有状态的集合记作 。
失配指针
AC 自动机利用一个 fail 指针来辅助多模式串的匹配。
状态 的 fail 指针指向另一个状态 ,其中 ,且 是 的最长后缀(即在若干个后缀状态中取最长的一个作为 fail 指针
fail 指针与 KMP 中的 next 指针相比:
- 共同点:两者同样是在失配的时候用于跳转的指针。
- 不同点:next 指针求的是最长 Border(即最长的相同前后缀
) ,
因为 KMP 只对一个模式串做匹配,而 AC 自动机要对多个模式串做匹配。有可能 fail 指针指向的结点对应着另一个模式串,两者前缀不同。
总结下来,AC 自动机的失配指针指向当前状态的最长后缀状态。
注意:AC 自动机在做匹配时,同一位上可匹配多个模式串。
构建指针
下面介绍构建 fail 指针的 基础思想:
构建 fail 指针,可以参考 KMP 中构造 next 指针的思想。
考虑字典树中当前的结点 , 的父结点是 , 通过字符 的边指向 ,即 。假设深度小于 的所有结点的 fail 指针都已求得。
- 如果 存在:则让 的 fail 指针指向 。相当于在 和 后面加一个字符 ,分别对应 和 ;
- 如果 不存在:那么我们继续找到 。重复判断过程,一直跳 fail 指针直到根结点;
- 如果依然不存在,就让 fail 指针指向根结点。
如此即完成了 的构建。
例子
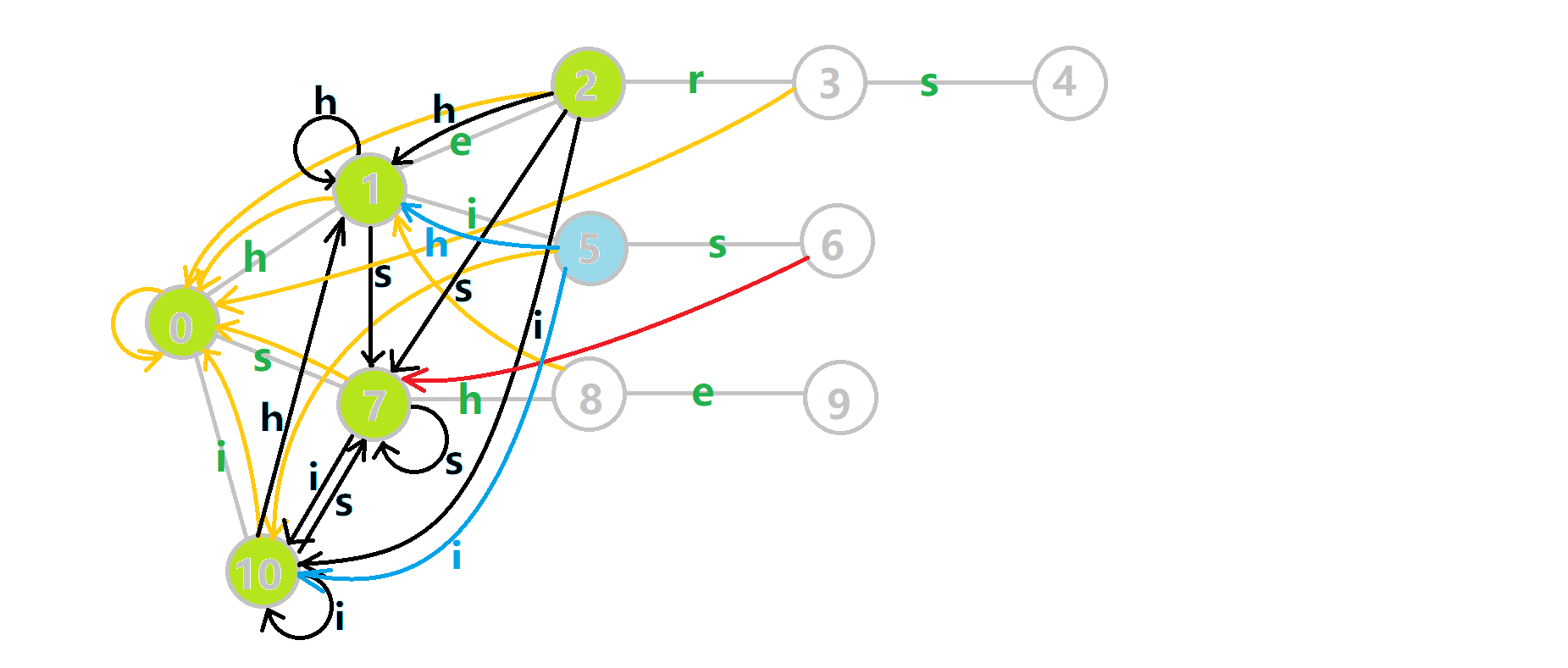
下面将使用若干张 GIF 动图来演示对字符串 、、、、 组成的字典树构建 fail 指针的过程:
- 黄色结点:当前的结点 。
- 绿色结点:表示已经 BFS 遍历完毕的结点。
- 橙色的边:fail 指针。
- 红色的边:当前求出的 fail 指针。
我们重点分析结点 的 fail 指针构建:
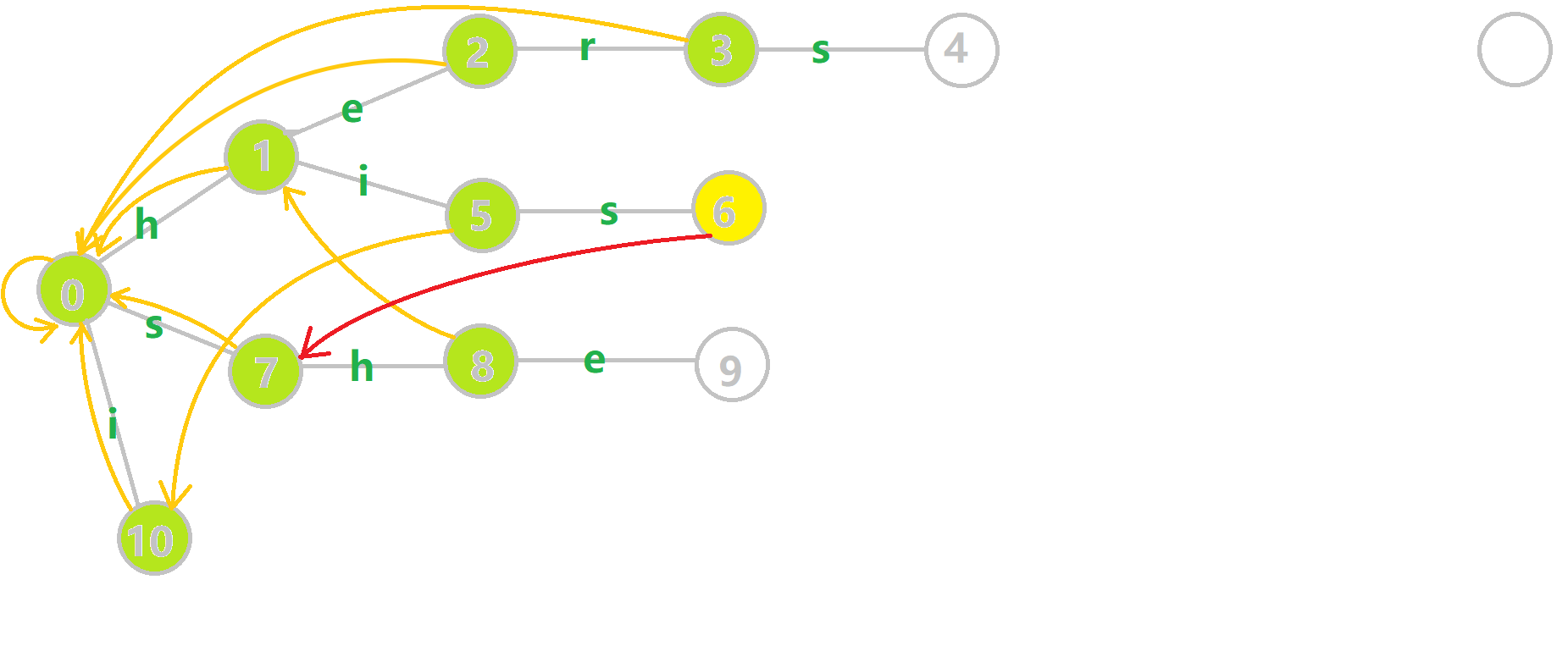
找到 的父结点 ,。然而结点 没有字母 连出的边;继续跳到 的 fail 指针,。发现 结点有字母 连出的边,指向 结点;所以 。
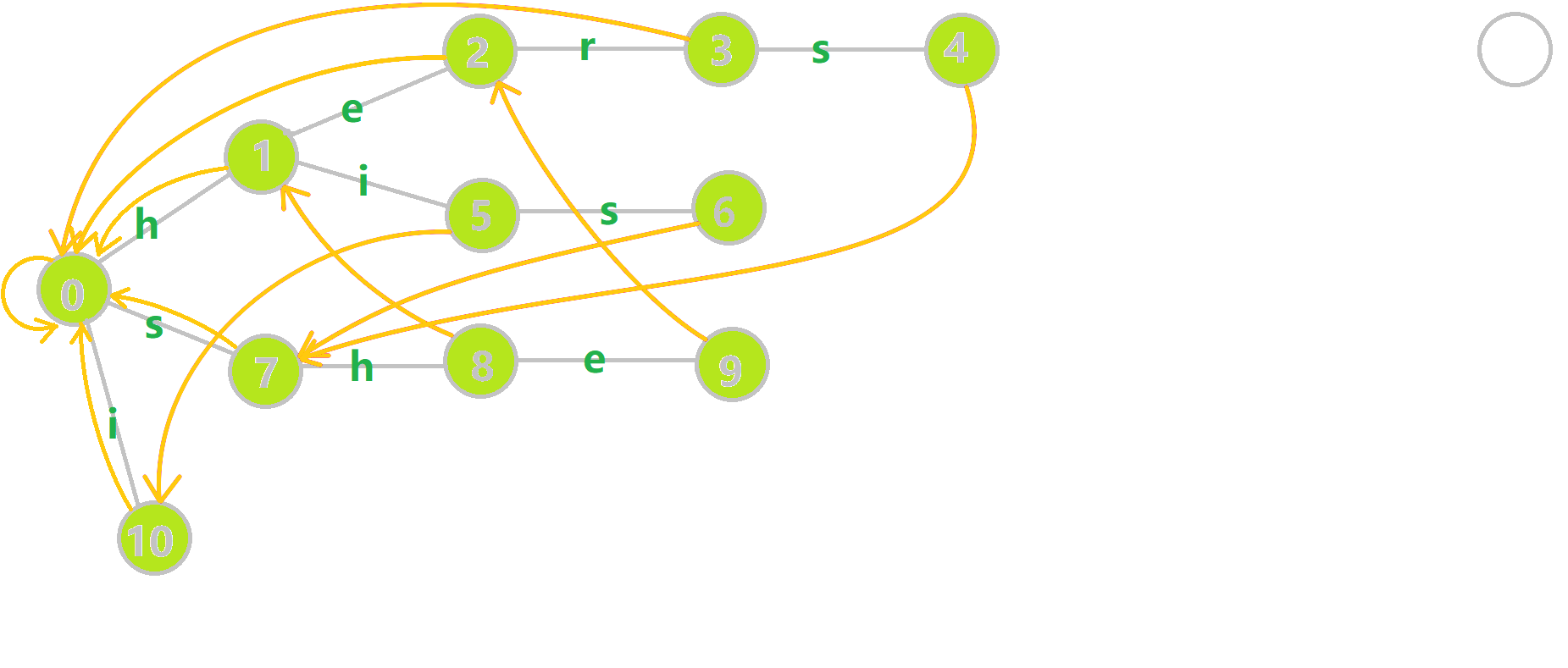
下图展示了构建完毕的状态:
字典树与字典图
关注构建函数 build,该函数的目标有两个,一个是构建 fail 指针,一个是构建自动机。相关变量定义如下:
tr[u].son[c]:有两种理解方式。我们可以简单理解为字典树上的一条边,即 ;也可以理解为从状态(结点) 后加一个字符 到达的状态(结点) , - 队列
q:用于 BFS 遍历字典树。 tr[u].fail:结点 的 fail 指针。
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i])
q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}解释
build 函数将结点按 BFS 顺序入队,依次求 fail 指针。这里的字典树根结点为 ,我们将根结点的子结点一一入队。若将根结点入队,则在第一次 BFS 的时候,会将根结点儿子的 fail 指针标记为本身。因此我们将根结点的儿子一一入队,而不是将根结点入队。
然后开始 BFS:每次取出队首的结点 ( 在之前的 BFS 过程中已求得
- 如果 存在,我们就将 的 fail 指针赋值为 。根据之前的描述,我们应该用
while循环,不停地跳 fail 指针,判断是否存在字符 对应的结点,然后赋值,但此处通过特殊处理简化了这些代码,将在下文说明; - 否则,令 指向 的状态。
这里的处理是,通过 else 语句的代码修改字典树的结构,将不存在的字典树的状态链接到了失配指针的对应状态。在原字典树中,每一个结点代表一个字符串 ,是某个模式串的前缀。而在修改字典树结构后,尽管增加了许多转移关系,但结点(状态)所代表的字符串是不变的。
而 相当于是在 后添加一个字符 变成另一个状态 。如果 存在,说明存在一个模式串的前缀是 ,否则我们让 指向 。由于 对应的字符串是 的后缀,因此 对应的字符串也是 的后缀。
换言之在 Trie 上跳转的时侯,我们只会从 跳转到 ,相当于匹配了一个 ;但在 AC 自动机上跳转的时侯,我们会从 跳转到 的后缀,也就是说我们匹配一个字符 ,然后舍弃 的部分前缀。舍弃前缀显然是能匹配的。同时如果文本串能匹配 ,显然它也能匹配 的后缀,所以 fail 指针同样在舍弃前缀。所谓的 fail 指针其实就是 的一个后缀集合。
Trie 的结点的孩子数组 son 还有另一种比较简单的理解方式:如果在位置 失配,我们会跳转到 的位置。注意这会导致我们可能沿着 fail 数组跳转多次才能来到下一个能匹配的位置。所以我们可以用 son 直接记录记录下一个能匹配的位置,这样保证了程序的时间复杂度。
此处对字典树结构的修改,可以使得匹配转移更加完善。同时它将 fail 指针跳转的路径做了压缩,使得本来需要跳很多次 fail 指针变成跳一次。
过程
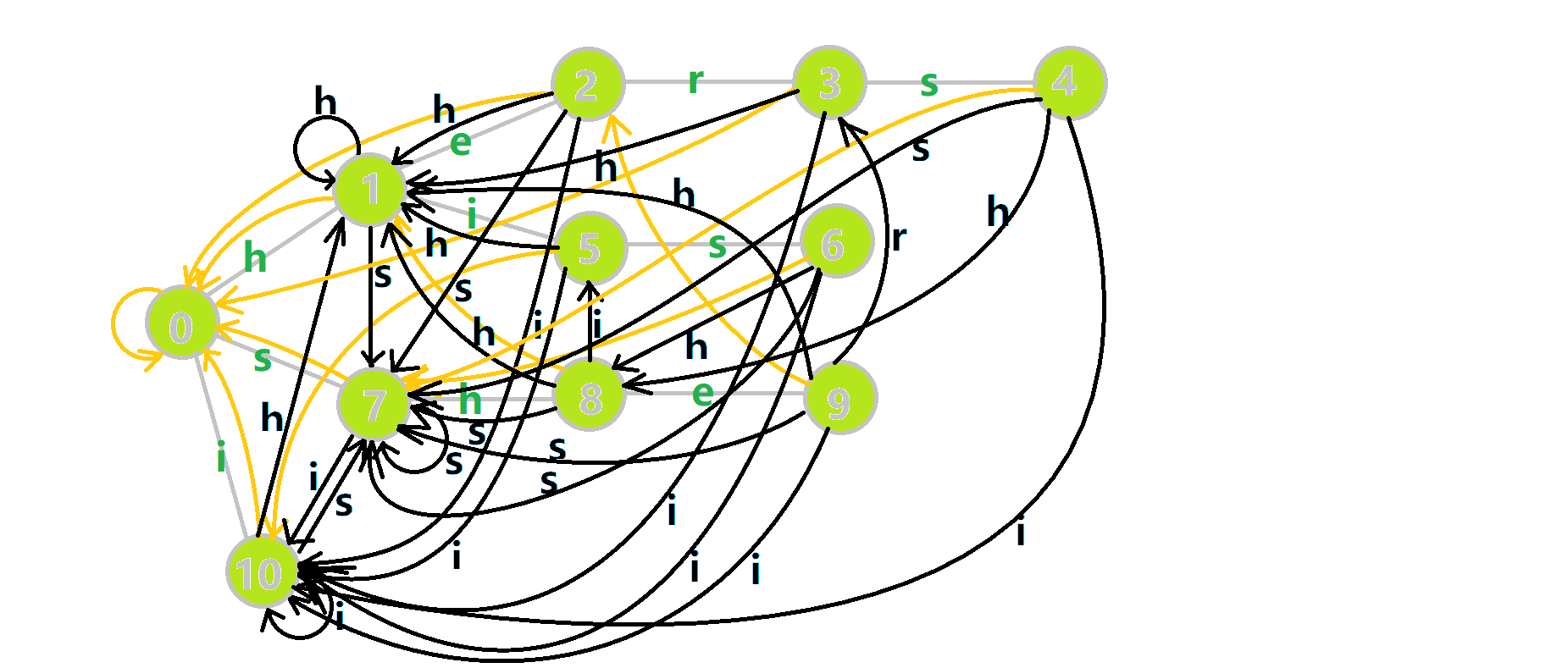
这里依然用若干张 GIF 动图展示构建过程:
- 蓝色结点:BFS 遍历到的结点 。
- 蓝色的边:当前结点下,AC 自动机修改字典树结构连出的边。
- 黑色的边:AC 自动机修改字典树结构连出的边。
- 红色的边:当前结点求出的 fail 指针。
- 黄色的边:fail 指针。
- 灰色的边:字典树的边。
可以发现,众多交错的黑色边将字典树变成了 字典图。图中省略了连向根结点的黑边(否则会更乱
本来的策略是找 fail 指针,于是我们跳到 发现没有 连出的字典树的边,于是跳到 ,发现有 ,于是 ;但是有了黑边、蓝边,我们跳到 之后直接走 就走到 号结点了。
这就是 build 完成的两件事:构建 fail 指针和建立字典图。这个字典图也会在查询的时候起到关键作用。
多模式匹配
接下来分析匹配函数 query:
int query(const char t[]) {
int u = 0, res = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
for (int j = u; j && tr[j].cnt != -1; j = tr[j].fail) {
res += tr[j].cnt, tr[j].cnt = -1;
}
}
return res;
}解释
这里 作为字典树上当前匹配到的结点,res 即返回的答案。循环遍历匹配串, 在字典树上跟踪当前字符。利用 fail 指针找出所有匹配的模式串,并累加到答案中。然后将匹配到的串的出现次数清零,这样就不会重复统计同一个串。在上文中我们分析过,字典树的结构其实就是一个 trans 函数,而构建好这个函数后,在匹配字符串的过程中,我们会舍弃部分前缀达到最低限度的匹配。fail 指针则指向了更多的匹配状态。最后上一份图。对于刚才的自动机:
我们从根结点开始尝试匹配 ,那么 的变化将是:
- 红色结点: 结点。
- 粉色箭头: 在自动机上的跳转。
- 蓝色的边:成功匹配的模式串。
- 蓝色结点:示跳 fail 指针时的结点(状态
) 。
效率优化
题目请参考洛谷 P5357【模板】AC 自动机。
因为我们的 AC 自动机中,每次匹配,会一直向 fail 边跳来找到所有的匹配,但是这样的效率较低,在某些题目中会超时。
那么需要如何优化呢?首先需要了解到 fail 指针的一个性质:一个 AC 自动机中,如果只保留 fail 边,那么剩余的图一定是一棵树。
这是显然的,因为 fail 不会成环,且深度一定比现在低,所以得证。
这样 AC 自动机的匹配就可以转化为在 fail 树上的链求和问题,只需要优化一下该部分就可以了。
这里提供两种思路。
拓扑排序优化
观察到时间主要浪费在在每次都要跳 fail。如果我们可以预先记录,最后一并求和,那么效率就会优化。
于是我们按照 fail 树,做一次内向树上的拓扑排序,就能一次性求出所有模式串的出现次数。
build 函数在原先的基础上,增加了入度统计一部分,为拓扑排序做准备。
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i])
q.push(tr[0].son[i]);
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
tr[tr[tr[u].fail].son[i]].du++; // 入度计数
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}然后我们在查询的时候就可以只为找到结点的 ans 打上标记,在最后再用拓扑排序求出答案。
void query(const char t[]) {
int u = 0;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
tr[u].ans++;
}
}
void topu() {
queue<int> q;
for (int i = 0; i <= tot; i++)
if (tr[i].du == 0)
q.push(i);
while (!q.empty()) {
int u = q.front();
q.pop();
ans[tr[u].idx] = tr[u].ans;
int v = tr[u].fail;
tr[v].ans += tr[u].ans;
if (!--tr[v].du)
q.push(v);
}
}最后是主函数:
int main() {
// do_something();
AC::build();
scanf("%s", s + 1);
AC::query(s);
AC::topu();
for (int i = 1; i <= n; i++)
printf("%d\n", AC::ans[idx[i]]);
// do_another_thing();
}DFS 优化
和拓扑排序的思路接近,不过我们使用 DFS 来代替拓扑排序。其实这两种方法本质上是相同的,都是将 fail 树的子树求和。
AC 自动机上 DP
这部分将以 P2292 [HNOI2004] L 语言 为例题讲解。
不难想到一个朴素的思路:建立 AC 自动机,在 AC 自动机上对于所有 fail 指针的子串转移,最后取最大值得到答案。
主要代码如下。若不熟悉代码中的类型定义,可以先看末尾的完整代码:
int query(const char t[]) {
int u = 0, len = strlen(t + 1);
for (int i = 1; i <= len; i++)
dp[i] = 0;
for (int i = 1; i <= len; i++) {
u = tr[u].son[t[i] - 'a'];
for (int j = u; j; j = tr[j].fail) {
if (tr[j].idx &&
(dp[i - tr[j].depth] || i - tr[j].depth == 0)) {
dp[i] = dp[i - tr[j].depth] + tr[j].depth;
}
}
}
int ans = 0;
for (int i = 1; i <= len; i++)
ans = std::max(ans, dp[i]);
return ans;
}但是这样的思路复杂度不是线性(因为要跳每个结点的 fail
我们再看看题目的特殊性质,我们发现所有单词的长度只有 ,所以可以想到状态压缩优化。
我们发现,目前的时间瓶颈主要在跳 fail 这一步,如果我们可以将这一步优化到 ,就可以保证整个问题在严格线性的时间内被解出。
我们可以将前 位字母中,可能的子串长度存下来,并压缩到状态中,存在每个子结点中。
那么我们在 build 的时候就可以这么写:
void build() {
queue<int> q;
for (int i = 0; i < 26; i++)
if (tr[0].son[i]) {
q.push(tr[0].son[i]);
tr[tr[0].son[i]].depth = 1;
}
while (!q.empty()) {
int u = q.front();
q.pop();
int v = tr[u].fail;
// 对状态的更新在这里
tr[u].stat = tr[v].stat;
if (tr[u].idx)
tr[u].stat |= 1 << tr[u].depth;
for (int i = 0; i < 26; i++) {
if (tr[u].son[i]) {
tr[tr[u].son[i]].fail = tr[tr[u].fail].son[i];
tr[tr[u].son[i]].depth = tr[u].depth + 1; // 记录深度
q.push(tr[u].son[i]);
} else
tr[u].son[i] = tr[tr[u].fail].son[i];
}
}
}然后查询时就可以去掉跳 fail 的循环,将代码简化如下:
int query(const char t[]) {
int u = 0, mx = 0;
unsigned st = 1;
for (int i = 1; t[i]; i++) {
u = tr[u].son[t[i] - 'a'];
st <<= 1; // 往下跳了一位每一位的长度都+1
if (tr[u].stat & st)
st |= 1, mx = i;
}
return mx;
}我们的 tr[u].stat 维护的是从结点 开始,整条 fail 链上的长度集(因为长度集小于 所以不影响st 则维护的是查询字符串走到现在,前 位(因为状态压缩自然溢出)的长度集。
& 运算后结果不为 ,则代表两个长度集的交集非空,我们此时就找到了一个匹配。
总结
时间复杂度:定义 是模板串的长度, 是文本串的长度, 是字符集的大小(常数,一般为
拓展
确定有限状态自动机
作为拓展延伸,文末我们简单介绍一下 自动机 与 KMP 自动机。
有限状态自动机(Deterministic Finite Automaton,DFA)是由
- 状态集合 。
- 字符集 。
- 状态转移函数 ,即 。
- 一个开始状态 。
- 一个接收的状态集合 。
组成的五元组 。
如果用 AC 自动机理解,状态集合就是字典树(图)的结点;字符集就是 到 (或者更多
KMP 自动机
KMP 自动机就是一个不断读入待匹配串,每次匹配时走到接受状态的 DFA。如果共有 个状态,第 个状态表示已经匹配了前 个字符。我们定义 表示状态 读入字符 后到达的状态, 表示 prefix function,则有:
(约定
我们发现 只依赖于之前的值,所以可以跟 KMP 一起求出来。
需要注意走到接受状态之后应该立即转移到该状态的 next。
时间和空间复杂度:。